
电 话:(0750)-2388095 159-9488-7489
传 真:(0750)-2388095
邮 箱:963433145@qq.com
网 址:www.leshunjixie.com
地 址:广东省江门市开平市长沙街道八一村委会乐胜里2号

按被装配工件在机器中的流动时间连贯性来分,推荐有间隙运动式装配机和连续运动式装配机。按装配机中工作位置数量来分,有单工位装配机和多工位装配机。按装配机中工件的传动轨迹来分,有圆形工作台式装配机和环形工作台式装配机。通常采用PLC控制,PLC要接收各种信号的输入,向各执行机构发出指令。机器中配备多种传感器等信号采集器来监视机器中每一执行机构的运行情况,经判断后发出下一步的执行指令。人机界面用来显示机器的运行情况、运行记录,以及用来由操作者向机器发指令。电子电气类 轻触开关装配机,继电器自动装配机,复位健装自动装配机,变压器自动装配机等五金类 脚轮自动装配机,轴承自动装配机,玩具自动装配机,齿轮自动装配机,牙箱自动装配机等自动装配机还应用到家电,汽车行业,总而言之,自动装配机将是工厂工业化的一种趋势.

随着经济化、科技化的发展,现在的劳动力成本的不断提高,老旧的机械设备发展道路已经不能满足企业的发展,企业转型升级开始关注工业自动化设备这一领域。特别是非标自动化设备,它不像传统普标设备那样制作简单,而是以灵活的量身定制、操作方便及功能多样给工业制造行业带来了新的发展商机。我国非标自动化设备开始崭露头角,非标自动化设备需求旺盛。特别是汽车的发展,大大增加需求。紧接着锁芯装配机的大众需求也开始逐渐增加,并且使锁芯生产加工行业也得到发展,目前的使用功能优势更加化明显与自然,在生产时能够满足更多的要求,让产品的品质优率提高,让生产效率更快。锁芯装配机在生产加工过程中锁芯装配及工作效率非常快,不需要工作人员参就能自动组装节省人工劳动成本,企业能提高利润。

随着经济化、科技化的发展,现在的劳动力成本的不断提高,老旧的机械设备发展道路已经不能满足企业的发展,企业转型升级开始关注工业自动化设备这一领域。特别是非标自动化设备,它不像传统普标设备那样制作简单,而是以灵活的量身定制、操作方便及功能多样给工业制造行业带来了新的发展商机。具特别是汽车的发展,大大增加需求。紧接着叶片锁芯装配机的大众需求也开始逐渐增加,并且使叶片锁芯装配机生产加工行业也得到发展,目前锁芯装配机的使用功能优势更加化明显与自然,在生产时能够满足更多的要求,让产品的品质优率提高,让生产效率更快。锁芯装配机在生产加工过程中锁芯装配及工作效率非常快,不需要工作人员参就能自动组装节省人工劳动成本,企业能提高利润。

高精度零件意味着长寿命和良好的可靠性。由于精度损失,机械产品经常报废。高效稳定弹子锁装配机产品的定期维护基本上是对其精度的验证和修复。任何机械制造系统都存在制造误差。例如,加工系统中的主要误差源包括机床,工具,夹具,弹子锁装配机制造工艺,环境和人员。因此,牙盒的自动装配机,在加工过程中不能完全准确地完成零件,弹子锁装配机自动化误差是不可避免的。零件的几何参数始终是可选的,并且存在误差,这是几何处理的差异。虽然元件上的几何误差会影响元件的功能性能和互换性,但只要将误差控制在一定范围内,元件几何元件实际值的变化就会控制在一定范围内。确保变化在一定范围内。相同规格的部件彼此足够相似,并且可以保证部件的功能性能和可互换性。
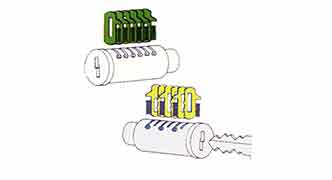
叶片锁芯装配机主要由锁套、小压簧、叶片、锁芯、钥匙和弹性挡圈组成,其特征在于锁套内部一侧有一条宽通槽。与该宽通槽相对应的一侧有两条窄通槽,两条窄通槽与宽通槽的径向中心线相对称,两条窄通槽的相邻两条边与该中心线相平行,另外两条边与中心线成2度-10度的防拨角,叶片锁芯装配机设计在锁芯内侧有4-8条叶片槽,的锁芯的锁套装在汽车门的锁孔内,其锁芯的前端与汽车门的开关连接件相固定,钥匙由两片金属板制成。每片金属板焊接或铆接一体,在每一片金属板的两侧都有牙花,一把钥匙形成四排牙花,对角两排牙花相同。

生产叶片锁芯装配机构成:生产锁芯自动装配机的机械系统包括机身,臂部,手腕,末端操作器和行走机构等部分组成,每一部分都有若干自由度的机械系统。此外,有的机器人还具有行走机构,若具有行走机构则构成行走机器人,若没有则构成单机器人手臂。 生产的机械机械系统相当于人的身体(骨骼,手,臂,腿等)。 生产叶片锁芯装配机工作原理:机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施一定的作业任务。末端操作器在空间的实时位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止。
地址:广东省江门市开平市长沙街道八一村委会乐胜里2号
电话:(0750)-2388095 159-9488-7489
传真:(0750)-2388095
邮箱: 963433145@qq.com Q Q:963433145

微信二维码


