
电 话:(0750)-2388095 159-9488-7489
传 真:(0750)-2388095
邮 箱:963433145@qq.com
网 址:www.leshunjixie.com
地 址:广东省江门市开平市长沙街道八一村委会乐胜里2号

设计是理论知识,生产上不要求多美观,实用就好,宗旨是简单、高效、经济、实用。作为资深的设计师,对机械方案的评估要有超强的判断能力,这样可以相应的避免走很多弯路,节约设备开发时间和成本。一个成功的设计师应该像一名久经沙场驰骋的将军,能做到运筹帷幄,对新开发的设备产品制造流程能把控的很好,达到预计的效果。非标自动化市场将快速增长,自动化产品运用深度持续增加。在这个领域,与发达国家相比国内整体水平上有10—20年的差距,新型非标自动化设备往往是机电一体化的设备,充分利用信息技术的最新成果。中国一些企业的设计人员却对电子产品不熟悉,不敢或不会选用,大大限制了水平的提高,但2000年开始,非标自动化在江浙沪、珠三角、京津地区获得了很大的应用,国内企业正在迎头赶上。

伴随着科学技术的发展与进步,我们开发的品种正在源源不断的增加,弹子锁装配机功能也在逐渐优化和变得多样化。因此,各种非标准的有领跑科技单面叶片锁装配机也开始出现市场上。随着商场自动组装机的种类逐渐增多,功能越来越多样化,自动组装机的定制化也越来越不明确。不清楚如何选择适合一种产品的自动装配机。那么,面对这样的疑虑,客户应该如何选择合适的自动装配机?这些是我们在选择时需要知道的要求,因为商场中的许多弹子锁装配机制造商在自动装配机的定制方面都不是很成熟,因为技能有限,许多厂家夸大自己的才能,所以许多制造商的定制机器都不会在未来实现他们想要的角色,在他们的心中犯了一个错误,这样他们就无法终结客户的内心价值。根据弹子锁装配机特点,自动组装机选择底板的直接和异步运输和直接定位;根据工作内容和生产周期,主动安装线选择结合树形结构,串联结构和并联结构的生产技能流程;针对多站扩展和分阶段实现的特点,单面叶片锁装配机智能工厂上位控制和单元控制二次计算机分布式控制方法,加上单元控制操作面板和检测故障预警系统,使整个控制系统更加完善。

叶片锁芯装配机在运行过程中发生故障的可能性随时间变化的规律称为通用机械的故障规律。这条曲线被称为“浴缸曲线”。中间横坐标为使用时间,纵坐标为故障率。这一变化周期可分为三个时段:头一时段是早期故障阶段,可能是因为、制造、仓储、运输等原因引起的故障,故障率普遍较高。叶片锁芯装配机运行、磨合、调整后,故障率逐渐降低,趋于稳定。第二时段是随机失效期,也称为正常运行期。这个时间零件尚未达到使用寿命,不易损坏。在严格操作和维护的情况下,故障率很小。这个阶段是机器的有效寿命。第三时段是磨损失效时段。由于部件的磨损、腐蚀和疲劳,故障率增加。此时,如果加强维修,及时更换即将达到生命周期的部件,可以延长正常的运行周期。。但是如果维护成本过高,则应考虑设备更新。
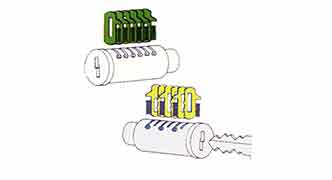
锁芯设有与各叶片槽相通并放有滑板的内腔,滑板的边设有对应于所述叶片槽的齿口,锁芯的表面还设有与所述内腔和钥匙孔垂直相交的弹珠孔,表面开有环形槽的弹珠下端伸入锁芯的弹珠孔后穿过滑板上的通孔再伸入钥匙孔内;钥匙穿环机设计锁芯的尾部套有第二锁芯;锁芯尾部开有径向的滚珠孔,相应地在第二锁芯的壁上开有离合孔、在外壳上开有平珠孔,滚珠孔内放置滚珠,在滚珠孔、离合孔、平珠孔构成的通道放置离合珠,平珠孔内放置平珠,并在平珠外端与外壳之间设置离合弹簧,离合珠的长度大于第二锁芯的壁厚;滑板尾端与滚珠接触的位置处为斜面。

如今,已成为许多生产公司的挑选。但是,许多公司在购买自动装配机时经常感到困惑。不知道什么样的主动化设备合适企业。在购买自动装配机时,不是以价格为重,不要迷信国外产品。挑选合适的产品。购买自动装配机的注意事项:首先,在挑选定制机器时,挑选专业公司,不要购买两手机或残次机器。其次,尝试在使用时遵从的组织,第三,不要在机器上放太多,以防发生意外第四,购买非标主动化设备时,必须对非标主动化设备有杰出的知道。必须根据弹子锁装配机生产工厂的实际情况购买。 只有更好。设备越大,产值越高,价格越高。高产品生产线,能耗越高,超过自身业务能力,将导致严重的设备搁置。

生产叶片锁芯装配机构成:生产锁芯自动装配机的机械系统包括机身,臂部,手腕,末端操作器和行走机构等部分组成,每一部分都有若干自由度的机械系统。此外,有的机器人还具有行走机构,若具有行走机构则构成行走机器人,若没有则构成单机器人手臂。 生产的机械机械系统相当于人的身体(骨骼,手,臂,腿等)。 生产叶片锁芯装配机工作原理:机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施一定的作业任务。末端操作器在空间的实时位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止。
地址:广东省江门市开平市长沙街道八一村委会乐胜里2号
电话:(0750)-2388095 159-9488-7489
传真:(0750)-2388095
邮箱: 963433145@qq.com Q Q:963433145

微信二维码


